
Covering large fields, potentially across varied terrain, and with sufficient accuracy to drive a tractor semi-autonomously (auto steered) down exactly the same tracks between furrows laid when the crops were sown requires extreme precision. The reasons behind this approach include increased density of crop sowing, and hence yield and, when used in conjunction with other satellite-based field moisture and crop monitoring applications, the ability to irrigate, spray insecticides and fertilizers in the most cost-effective manner possible. Achieving such precision control however raises two technical challenges.
Firstly, the accuracy of the derived GPS data needs to be improved such that the repeatable accuracy is better than +/- 15 cm and, secondly, that changes in terrain and the tractor’s exact position over the ground can be determined.
Achieving the positional accuracy has been made possible using a technique called carrier-phase enhancement (CPGPS) or also named real time kinematic (RTK). This approach measures the phase of the GPS signal carrier rather than the timing information content contained within the signal. The practical implementation of RTK however has a number of difficulties in comparing signal phase difference and a popular way to access the more precise phase measurements are by using a low cost radio modem to retransmit timing information from a base station to cover a given area. In dense farming regions suppliers of tractor guidance systems have set up a network of base stations in order that farmers can take full advantage of the precise location capabilities. Many suppliers are quoting sub 3cm repeatable accuracy using the RTK approach.
Being able to position a tractor to this degree of accuracy is impressive but there is one fundamental problem. Measurement of the GPS data really means that you know precisely where the antenna is situated, and typically this is in the centre of the cab roof.
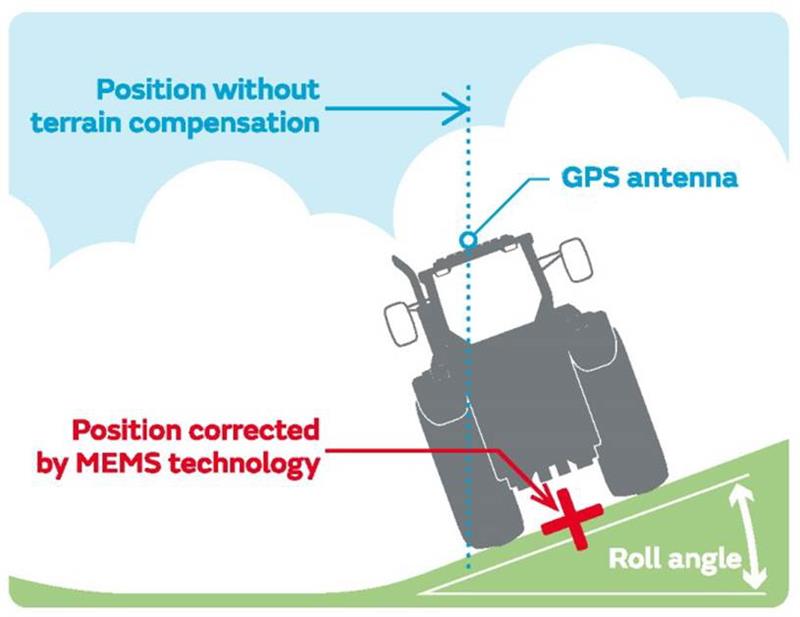
Figure 1 – The need to compensate for the terrain the tractor is driving over
With reference to Figure 1 you can see the need to compensate for the tractor’s exact centre desired position over the ground rather than where the antenna is situated. In this case the tractor is driving along a slope but it could equally be driving up a slight slope in which case the position would still need to be adjusted. Achieving positional adjustments are an ideal application for MEMS-based accelerometers and gyroscopes. Recent advances in MEMS technology has resulted in significant improvements in stability, noise and immunity to mechanical shock, all of which are vital for such precision agricultural applications involving moving heavy machinery over undulating terrain. In this way the slope, direction of movement, and the change of the slope can be accurately measured. An accelerometer is used to measure the angle of inclination relative to the Earth’s gravity. Due to the accelerometer's measurement principle, it is also disturbed by the machine’s natural movement and motion making the inclination information imprecise. The gyroscope measures angular rate (output in degrees per sec), and therefore can be used to detect the change of inclination angle. In moving machine applications, such as in a large tractor, use of either an accelerometer or gyroscope alone are not enough to provide precise inclination information, but combining the two with an advanced algorithm gives accurate inclination information. The principle is that an accelerometer is used for the static inclination angle and the gyroscope output is used to compensate for tractor motion seen in the accelerometer signal and so enabling dynamic inclination measurement.
Figure 2 – Impact of roll, pitch and yaw
The accelerometer and gyroscope is required to measure the three axis of movement that a tractor will experience, namely that of roll, pitch and yaw as indicated in figure 2.
Bringing the GPS and RTK data together and processing the data acquired from the accelerometer and gyroscope will take place in an inertial measurement unit (IMU). Typically a combined accelerometer and gyroscope sensor such as Murata’s SCC2000 series gyro accelerometer combo MEMS sensor device will be used in the IMU. The output from the IMU will be used to drive the tractor’s steering mechanism, either via hydraulic controls or via a drive servo that uses a mechanical coupling to the tractor’s steering wheel. Kalman filter algorithms are highly likely to be used within the IMU to take account of noise, location estimates and drift.
The combined sensor device offers good temperature stability over the full automotive range from -40 to + 125 degrees C, shock sensitivity and bias stability characteristics and consists of a low-g 3-axis accelerometer with two angular rate sensor options of either X or Z-axis detection, together with a 32-bit digital SPI interface. The sensor has a software selectable 10 or 60 Hz low pass filter that can be configured via SPI. Gyro range is +/- 125 degrees per second with sensitivity of 50 LSB per degree per second. Typical accelerometer offset temperature drift is +/- 6 mg for the 2g sensor and +/-12mg for the 6g version. Gyroscope offset temperature drift is typically in the range +/-0.5°/s for the 125°/s X & Z -axis product versions. The Gyroscope has a typical offset short-term bias instability of 1°/h for the 125°/s X-axis device and 2°/h for the 125°/s Z-axis product. The single-chip 24-pin MEMS package measures just 15.00 x 12.10 x 4.35 mm and takes up little PCB space.
When designing an IMU for any semi or fully autonomous vehicle the embedded developer should also carefully investigate the error handling capabilities of the sensors being considered. Directly controlling the steering and, potentially, the speed of such large agricultural machinery could have dire consequences should any component of the IMU suddenly create invalid data. Should the MEMS sensor deliver erroneous data the only viable result is that it will fail-safe and communicate failure/error flags to the host application.
For example, in the case of the SCC2000 series, this device is already being used for other automobile applications that come under the requirements of the ISO26262 software safety standard. These include active or dynamic chassis, and roll-over protection. The sensor runs a self-test diagnostic during power-up to check critical sensor functions and during operation continuous checking of about 20 parameters take place. The Murata sensor is also already is use in a number of IMU-based agriculture machinery guidance applications.
By incorporating highly sensitive yet stable MEMS sensors together with advances in enhanced precision GPS receivers, manufacturers of high-value agricultural machinery can maintain their market position. In so doing farms can maintain profitability by improving crop yields and operating in the most efficient ways possible.





